BUILD
For the second prototype we have to rethink the whole concept of the system. A hernia cannot physically be felt and thus the emphasis of this second prototype is on replicating a situation of dealing with the patient. For this build I therefore want to focus more on a realistic skin and perfecting the user interaction.
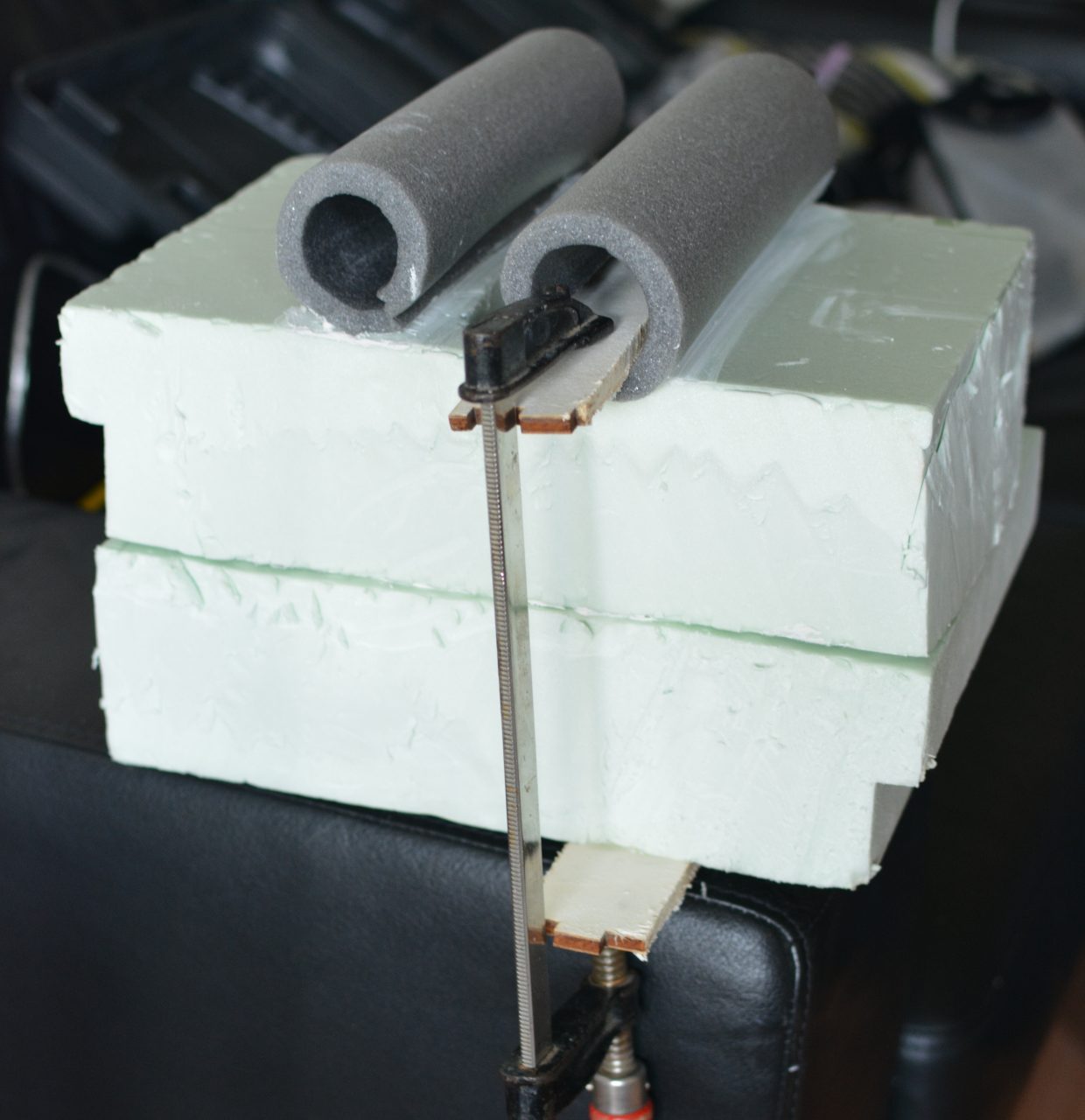
To create a better feeling skin I went to FormX in Amsterdam to get liquid silicon rubber that I could pour in a mold. To read more about how I cast the skin take a look at: Skin replica from FormX. The skin is placed on top of the base made from polystyrene (just like the version one) and two tubes meant for isolating made from Polyethylene. When gluing these expended foam materials you have to be careful not to use any aggressive glues. These glues contain acid which eats away the foam and destroys the material. To avoid this, I got glue meant for sticking Styrofoam together, this is more like a kit (kind of like cement) and is applied via a kit sprayer. The drying period for this kit, however turned out to be a full day and it would not fasten tightly. By means of trial-and-error I eventually figured out glue from a gluegun works best and attaches really quick.
Now the base and top layer (the skin) are ready I have to think of a way to recreate the same haptic feeling a vertebra would give. When pressing the prototype the user should feel a lot of resistance and when releasing it should come back to the same initial height. To tackle this design specification I came up with two approaches: using spring loaded rods or use pressurized syringes.
Spring loaded rods
When thinking about a technique to determine a fixed start position but still have the ability to apply force on the system to be able to to move the system up and down, one quickly comes to using a spring. attaching a rod to the spring makes for a bigger area to apply force to and makes it easier to position the spring inside the artefact. Spring loaded rods can be bought as is.
Pressurized syringes
Left over from the first prototype I still have syringes laying around. When there is air in the syringe and you close of the tip (pressurize it) the top part of the syringe acts as a spring. The air inside the syringe can be slightly compressed and will push back on the top when no force is applied.
This approach seems better suitable because it easier to fixate in the base form and I already have the components. Furthermore the top of the syringes make for a good surface area to attach FSR sensors to. Getting a reading on the amount of pressure applied when using spring loaded rods would be a lot harder to integrate.
The syringes make it possible to have a dynamic body, meaning the vertebrae can be adjusted to be at any height in the body. This means a student can be served about any body type he/she might experience during a real session.
- haptic feedback vs. tactile feedback
- focus op een wervel (normaal gesproken natuurlijk tussenwervel)
OBSERVATIONS
After performing 18 user tests with this prototype there are some observations made and feedback received regarding this setup.
The system is currently deemed simplistic and from the survey it becomes clear the testers do not feel like they are learning an awful lot. Furthermore some testers are observed to treat the system as a simple computer, instead of the replication of a patient. They start simply pushing the buttons underneath the skin with one finger rather than massaging the skin. This does not mean the system is regarded unrealistic, the skin is mostly considered a valued addition and adds to the experience. It does however not react like a real human would and feels slightly cold.
Another important view that concludes from this prototype is the meaning of the colours of the LEDs, located under the skin. There is no remarks that the feedback provided by these is off or does not represent any real situation. But the outcome of the tests with different colour settings of the (see section: the software) it came to light that in this case the colours are perceived differently than with any regular system. Normally with any system the colour red means stop; don’t touch. Green on the other hand indicates to proceed . With this system the most optimal and best understood colour setting is the reverse. When placed into context it becomes clear that green lighted vertebrates are OK and do not need any further attention, while the red lighted vertebrate is understood to be the focal point of attention.
Furthermore, the fading in brightness of the LEDs is often associated with pain experience and when left out, the experiment is received less realistic.
RECOMMENDATIONS
Although the simplicity of the system does not create an unrealistic feeling, it leaves testers with an unfulfilled feeling. A solution to this might be to increase the realism due to adding another layer of feedback. The functionality of the system is reduced to: “an LED lights up when I push the button.” In reality patient’s will react more unduly than the system does right now. It would be beneficial to add at least one other layer of interactivity.
Something else that might add to a more seamless experience is a more adequate reaction to the users input. Right now the system only registers a press on one vertebrae at a time (read in section The Software why). Having the ability to register and react on multiple vertebrae at once will not only stimulate to an understanding of the system (see the relation between the green and red colours) but might also result in a more seamless experience, leaving the user with a better feeling after using the system.
WHY NO VIBRATING?
WHY NO AUDIO?
Inclusion of multiple modalities.