The main goal of the practicing apparatus is to be able to simulate a hernia. The aim is not a simulation of what the patient is experiencing, but a simulation in the way the practitioner is able to feel and manipulate it. I already wrote a post about how a hernia occurs, in this post I want to focus on ways to simulate one and incorporate it in a practicing device.
As a first rapid prototype I simulated a intervertebrate with clay, to get the feeling of shape, size and dimensions. I made one with hernia and one without. I tested the size against a plastic spine like the one in this picture:
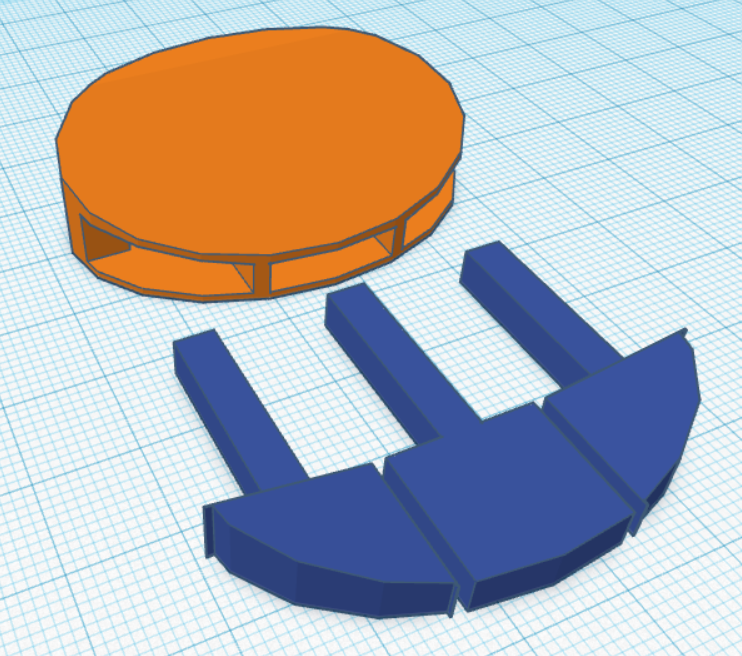
After I was pleased with the overall form of the clay model, I used it as an example for a 3D-model. The second prototype is a 3D printed form with different valves as is shown in the picture at the top. These valves simulate the hernia at different positions. The idea is that they can be attached to motordrivers and operated at will. I am currently in the process of picking either a electronic approach (so with the motordrivers) or a mechanic approach with balloons and water/coffee beans. How this turns out can be read in section: First prototype